SensorKit
40 Sensoren für die gängigsten Open-Source Plattformen
Ein Kit für alle Anwendungen!
Das hochwertige SensorKit X40 wurde speziell für den Betrieb mit den beliebtesten Open-Source Plattformen entwickelt. Es ist kompatibel zu Einplatinen-Computern (Arduino, Raspberry Pi, Banana Pi, Cubieboard, Cubietruck, Beaglebone, pcDuino) und Mikrocontrollern (atmega, AVR, MicroCHip PIC, STM32 usw.).
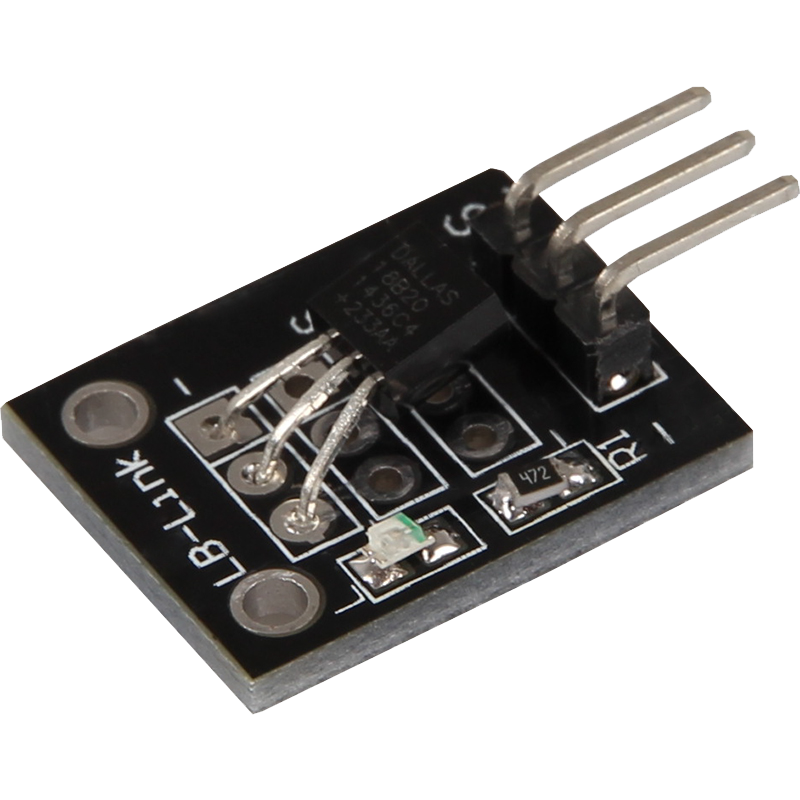
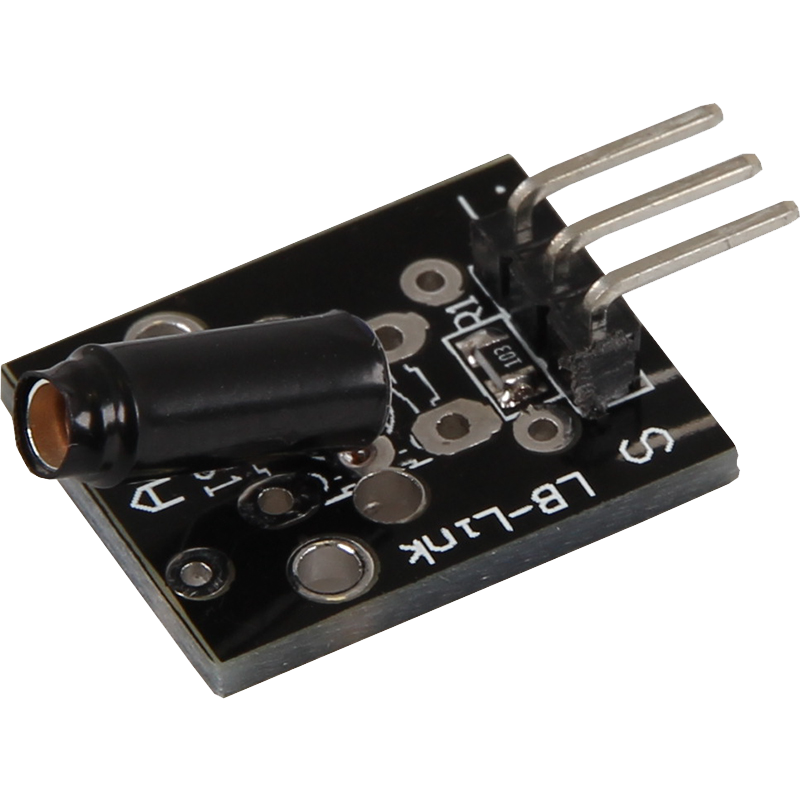
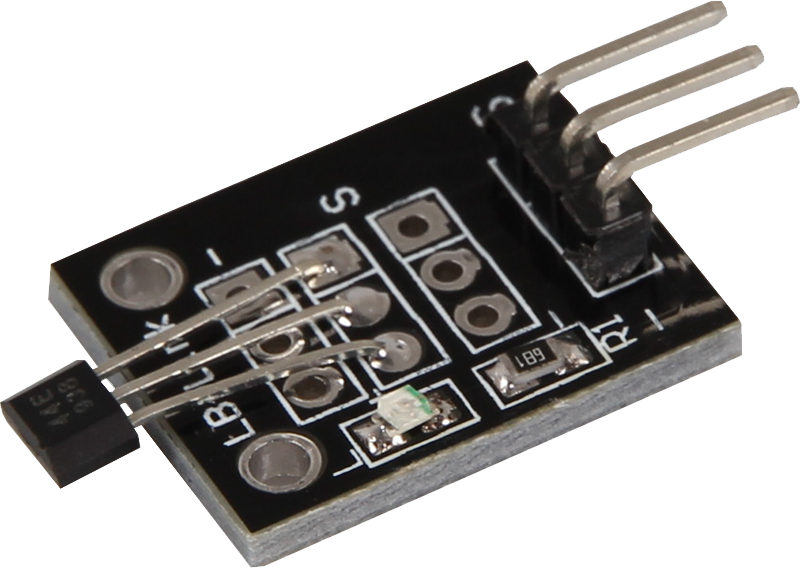
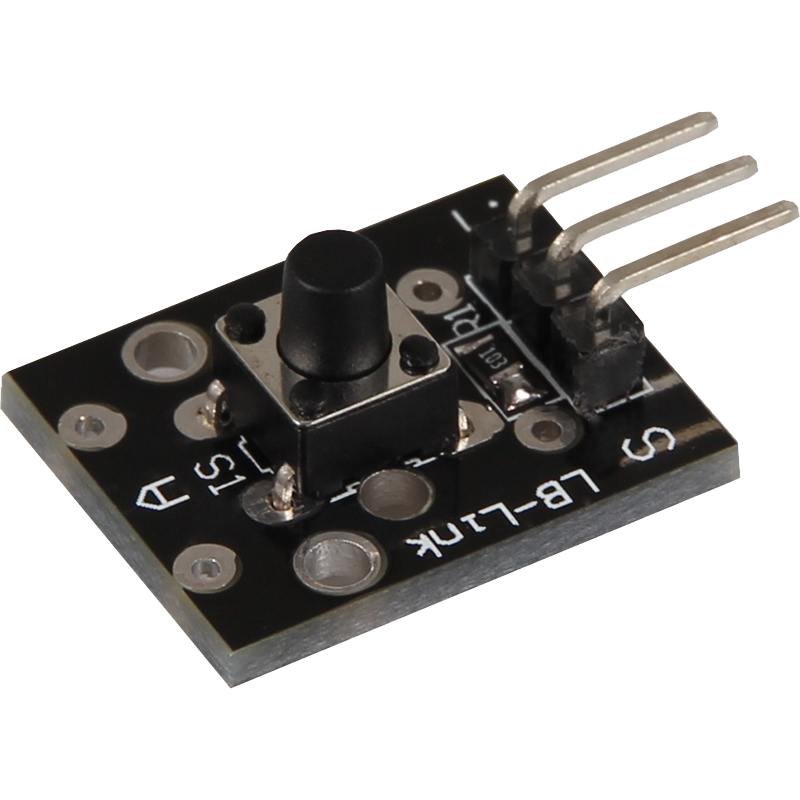
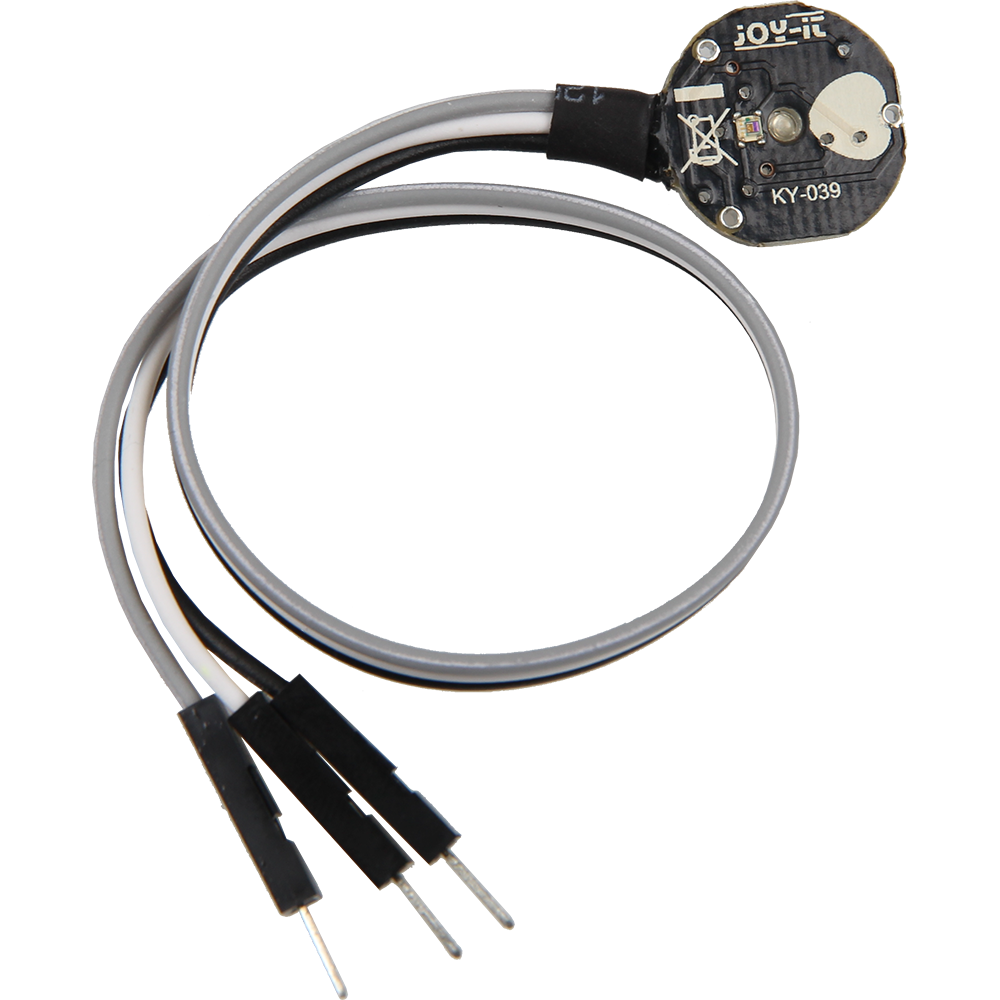
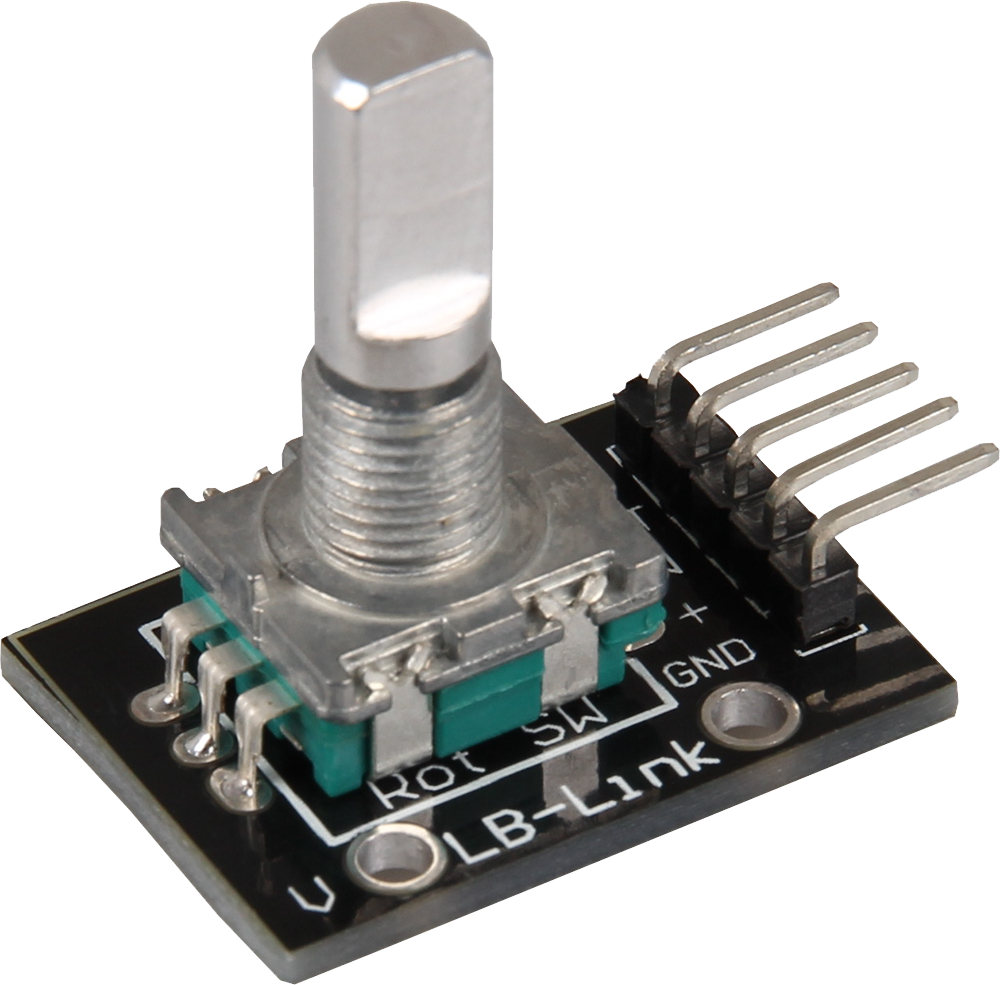
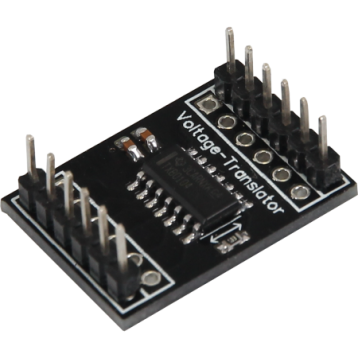
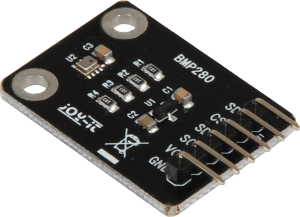
Das Kit besteht aus insgesamt 40 verschiedenen Sensoren die entweder fest verlötet oder auf ein Breadboard gesteckt werden können, um an verschiedenen Schaltungen oder Experimenten zu arbeiten.